Automatyzacja i autonomizacja transportu
Dział Obsługi Klienta

Automatyzacja transportu obejmuje rozwój technologii umożliwiających autonomiczne lub częściowo autonomiczne działanie pojazdów oraz systemów wspomagających operatorów i kierowców. W ramach prowadzonych prac realizujemy badania, rozwój oraz integrację systemów autonomii pojazdowej, systemów ADAS oraz środowisk symulacyjnych wykorzystywanych do projektowania i testowania nowoczesnych rozwiązań transportowych.
Nasze działania obejmują cały proces rozwoju systemów – od projektowania algorytmów i integracji sensorów, przez symulację i generowanie danych, aż po badania eksperymentalne w warunkach rzeczywistych.
Rozwój systemów autonomii
Rozwój systemów autonomii
Prowadzimy prace badawczo-rozwojowe nad systemami autonomicznej jazdy oraz systemami wspomagania kierowcy i operatora. Obejmują one zarówno rozwój oprogramowania, jak i integrację komponentów sprzętowych w pojazdach testowych.
Zakres prac:
- implementacja funkcji jazdy autonomicznej
- globalna i lokalna lokalizacja pojazdu
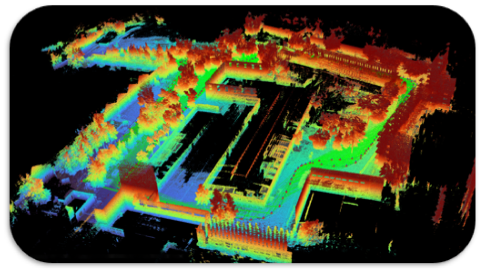
- mapowanie i tworzenie map 3D otoczenia
- planowanie ścieżki globalnej i lokalnej
- sterowanie elementami wykonawczymi pojazdu
- filtrowanie i fuzja danych z wielu sensorów
- detekcja oraz śledzenie obiektów
- systemy podążania za operatorem (follow-me)
- systemy utrzymania pasa ruchu i inne funkcje autonomii
W ramach prac tworzone są również platformy badawcze umożliwiające implementację oraz testowanie algorytmów autonomii w rzeczywistych pojazdach.
Integracja i implementacja systemów autonomii
Integracja i implementacja systemów autonomii
Proces implementacji systemów autonomicznych obejmuje zarówno przygotowanie oprogramowania, jak i dobór oraz konfigurację komponentów sprzętowych.
Realizowane działania:
- dobór komponentów systemów autonomii
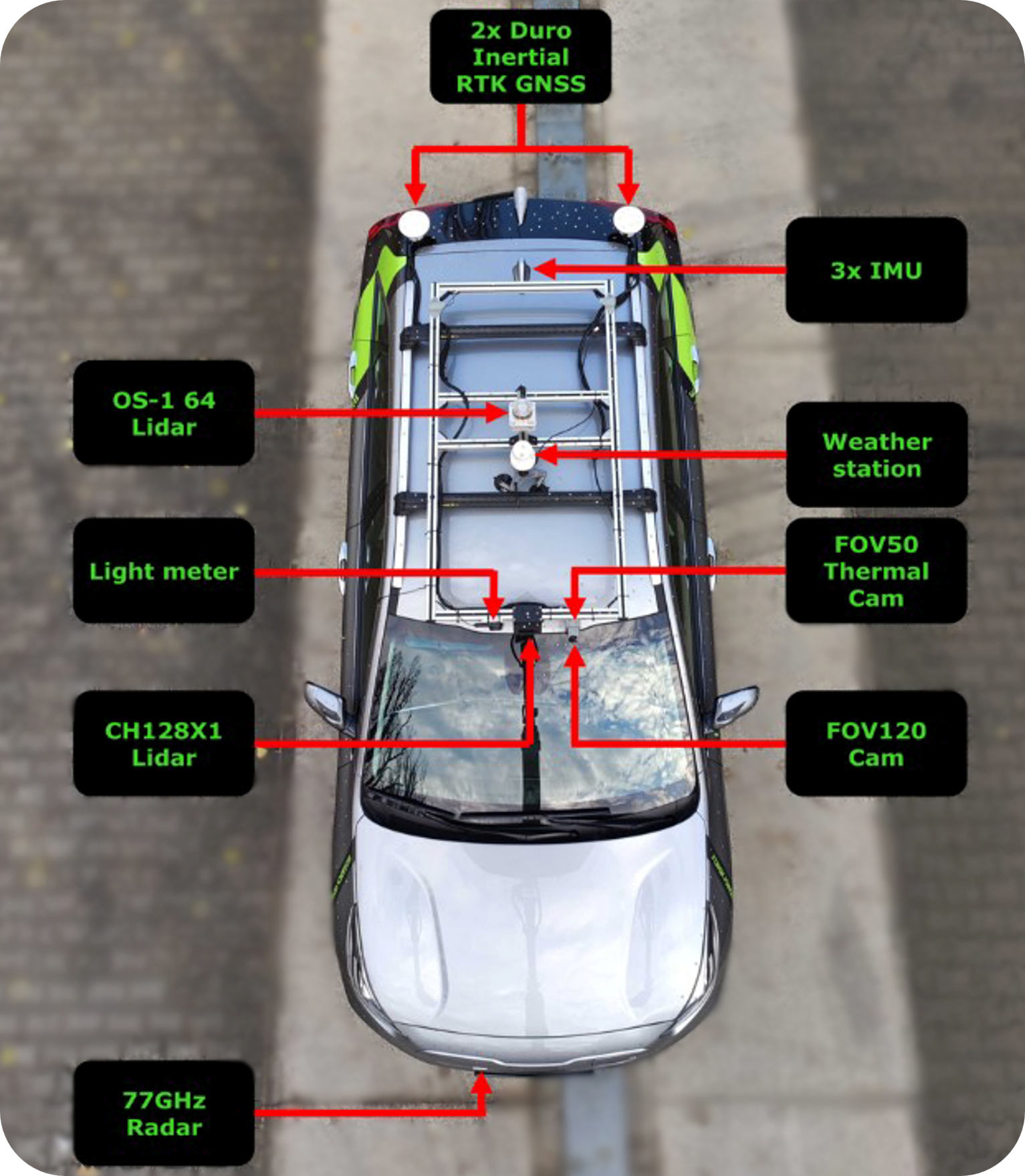
- integracja lidarów, radarów, kamer i systemów nawigacyjnych
- implementacja algorytmów autonomii
- przygotowanie interfejsów sterowania
- integracja z systemami zarządzania flotą
- integracja i testy w środowisku symulacyjnym oraz rzeczywistym
- budowa systemów zbierania danych
- pozyskiwanie danych rzeczywistych i syntetycznych
W ramach prac wykonywana jest również kalibracja sensorów oraz konfiguracja wszystkich komponentów systemu w pojeździe.
Rozwój środowisk symulacyjnych
Rozwój środowisk symulacyjnych
Środowiska symulacyjne pozwalają na bezpieczne testowanie algorytmów autonomii jeszcze przed ich implementacją w rzeczywistych pojazdach. Tworzone symulacje odwzorowują zarówno pojazdy, jak i ich rzeczywiste otoczenie.
Funkcjonalności środowisk symulacyjnych
- odwzorowanie rzeczywistego otoczenia drogowego
- symulacja uczestników ruchu drogowego
- symulacja sensorów pojazdów i infrastruktury
- odwzorowanie warunków pogodowych i oświetleniowych
- symulacja ruchu pojazdów zautomatyzowanych
- implementacja różnorodnych scenariuszy testowych
- integracja symulacji z systemami ROS i ROS2
Dzięki temu możliwe jest testowanie algorytmów autonomii w realistycznych warunkach jeszcze przed ich implementacją w pojazdach testowych.
Generowanie danych syntetycznych
Generowanie danych syntetycznych
W ramach środowisk symulacyjnych rozwijane są także narzędzia do generowania danych syntetycznych wykorzystywanych w procesie uczenia systemów AI.
Zakres prac:
- generowanie danych syntetycznych dla systemów percepcji
- automatyczne etykietowanie danych
- generowanie etykiet 2D oraz masek semantycznych
- wprowadzanie losowości do parametrów symulacji (pogoda, oświetlenie, tekstury, kształty)
- modyfikacja parametrów środowiska symulacyjnego
Tak przygotowane dane pozwalają znacząco przyspieszyć proces trenowania algorytmów sztucznej inteligencji.
Systemy bazujące na sztucznej inteligencji
Systemy bazujące na sztucznej inteligencji
Rozwijamy rozwiązania wykorzystujące metody sztucznej inteligencji do analizy danych sensorycznych i interpretacji otoczenia pojazdu.
Główne obszary prac:
- wykrywanie i identyfikacja obiektów z wykorzystaniem kamer i lidarów
- rozpoznawanie obiektów z fuzją danych z wielu sensorów
- segmentacja semantyczna i panoptyczna sceny drogowej
- analiza danych z kamer termowizyjnych
- półautomatyczne etykietowanie danych treningowych
- wykorzystanie języka naturalnego w systemach zarządzania pojazdami i robotami
Implementacja systemów autonomii w pojazdach
Implementacja systemów autonomii w pojazdach
Opracowane rozwiązania są wdrażane w rzeczywistych platformach badawczych oraz pojazdach eksperymentalnych.
Zakres prac:
- implementacja funkcji autonomicznych w pojazdach osobowych
- implementacja systemów autonomii w pojazdach bezzałogowych
- integracja systemów w pojazdach pracujących poza drogami publicznymi
Obszary zastosowań
- bezpieczeństwo i obronność
- przemysł 4.0
- rolnictwo 4.0
- systemy autonomiczne w logistyce i transporcie
Badania systemów ADAS i autonomii pojazdowej
Badania systemów ADAS i autonomii pojazdowej
Prowadzimy badania systemów wspomagania kierowcy oraz systemów autonomicznych zarówno w środowisku symulacyjnym, jak i w warunkach rzeczywistych.
Rodzaje badań:
- badania w środowisku wirtualnym
- badania w warunkach zbliżonych do rzeczywistych (symulowane scenariusze drogowe)
- badania w rzeczywistym ruchu drogowym
Przykładowe badane systemy:
- automatyczne hamowanie awaryjne (AEBS)
- system ostrzegania przed kolizją
- asystent utrzymania pasa ruchu (LKA / LDWS)
- systemy kierowania w sytuacjach krytycznych
- adaptacyjny tempomat
- inteligentne systemy dostosowania prędkości
Badania prowadzone są zgodnie z obowiązującymi regulacjami i standardami, w tym m.in.:
- regulaminami ONZ
- rozporządzeniami UE
- protokołami Euro NCAP
- standardami SAE
- normami ISO
- General Safety Regulation
- ustawą Prawo o ruchu drogowym
- metodami producentów.
Infrastruktura badawcza i wyposażenie
Infrastruktura badawcza i wyposażenie
Do realizacji badań wykorzystywana jest specjalistyczna infrastruktura pomiarowa oraz platformy badawcze.
Wyposażenie badawcze:
- cele miękkie (samochód osobowy, pieszy, rowerzysta, dziecko, motocyklista)
- platformy samojezdne (UFOpro, UFOmicro)
- robot kierujący
- roboty sterujące pedałami
- systemy satelitarno-inercyjne
Systemy sensoryczne:
- lidary
- radary
- kamery RGB i kamery stereo
- kamery termowizyjne
- GNSS
- IMU
Platformy testowe
- platforma badawcza do testów systemów w warunkach drogowych
- autonomiczna platforma UGV (PAWO) – bezzałogowa platforma kołowa
- zestawy sensorów do gromadzenia danych z dróg.